小澤 仁(おざわ・ひとし)
 バンコック銀行執行副頭取。1977年東海銀行入行。2003年より現職。米国在住10年。バンコク在住22年。趣味:クラシック歌唱、サックス・フルート演奏。
バンコック銀行執行副頭取。1977年東海銀行入行。2003年より現職。米国在住10年。バンコク在住22年。趣味:クラシック歌唱、サックス・フルート演奏。
バンコック銀行日系企業部には、新たに採用した行員向けに「小澤塾」と名付けた6カ月の研修コースがある。この期間、銀行商品や貸し出しの基本などを宿題回答形式で、英語で講義を行う。この講義と並行して、日本人新入行員として分析力、企画力などを磨くため、レポートの提出を義務づけている。今回は、今年7月に小澤塾を卒業した中越隆さんの「自動運転の開発状況と日本の立ち位置」と題する提言を紹介したい(注=本文中の図表は、その該当するところを一度クリックすると「image」画面が出ますので、さらにそれをもう一度クリックすると、大きく鮮明なものを見ることができます)。
1章 はじめに
新型コロナウィルス禍が長期化する中で非接触社会を実現する無人配送車/無人消毒車などの自動運転車がニュースなどで取り上げられ、注目を集めている。米国防総省傘下のDARPA(国防高等研究計画局)が2000年代半ばに3回開催した自動運転車(無人)によるカーレースがきっかけで再び注目を集めるようになった自動運転車には「交通事故削減・運転負荷軽減・高齢者移動支援」など数多くの期待が寄せられており、最先端の技術開発競争が繰り広げられている。以下、自動運転車の構造、問題点などを明らかにし、理解を深める一助としたい。
2章 自動運転車の構造
2-1自動運転車(Self-Driving Car)の定義
自動運転は「乗り物や移動体の操縦を人の手によらず、機械が自立的に行うシステム」と定義され、従来ドライバー(人間)が行っていた「認知」→「判断」→「操作」の手順を各種機械が繰り返し行い、自動車を走らせることを目的とする。
2-2「認識」(認知)
物体検知、自社位置推定、距離測距を行い周辺環境の把握を行うことを「認識」(認知)と言う。ドライバー(人間)が「目」「耳」などの五感を使って行うことをカメラ、GNSS(全地球航法衛星システム)、LiDAR(ライダー)などが行う。
2-2-1 物体検知:カメラ
カメラを使用し、自動車、自転車及び歩行者の識別の他、信号機の灯色や道路標識を識別等の検知を行う。
AI(人工知能)画像処理機能が使われ、「画像分類(その画像が何なのかを識別)→画像検出(その画像のどこに何があるかを識別)→画像セグメンテーション(その画像領域の意味を識別)」の手順で物体を検知する。「夜、逆光、悪天候」の際に識別のレベルが落ちることが短所となる。
2-2-2 自車位置推定:全地球航法衛星システム(GNSS)、IMU(慣性計測装置)、DMI(走行距離計)
上空にいる三つの衛星との距離から、端末=自車の現在位置を推定する。三つの衛星による測距では距離誤差 (1cm〜5m)が発生すること、トンネル・ビル内での受信が難しく正確な位置情報が取得できない場合があることが短所となる。
GNSSの短所を補完するため、IMU(慣性計測装置、物体がどの程度回転しているのかを計測するジャイロセンサーと加速度センサーで角度〈方向〉と速度の変化を計測)、DMI(走行距離計、タイヤの回転数を計測することで進んだ距離を計算)の二つの装置も使用される。また日本では「みちびき」(準天頂衛星システム)、「電子基準点」(日本全国約1300カ所に設置されたGNSS観測点)を使用した自車位置特定システムも開発されている。
2-2-3距離測距:LiDAR、ミリ波レーダ、超音波ソナー
① LiDAR(Light detection and ranging)
レーザー光を照射し、対象物から反射して跳ね返ってくる時間から距離や位置、形状を計測する。短い波長の赤外線を使うため、反射率の低い小さな対象物まで正確に検出することが可能。しかし悪天候時に検知能力が低下すること、他のセンサーと比較して高価なことが短所となる。LiDARを用いた自動運転では、車線情報や地形、信号、道路規制など、常に最新の情報が反映された高精3次元位置情報(ダイナミックマップ)が非常に重要な役割を果たしている。
②ミリ波レーダ
パルス状の電波を発射し、物体に当たって跳ね返ってきた電波で対象物の速度や距離などを検知する。夜間や悪天候下でも障害物などの方向と距離を計測可能なこと、LiDARと比較すると安価なことが長所。しかし小さい物体の検知が困難なことや段ボールなどの反射率の低い物体の検知が困難なことが短所となる。
③超音波ソナー
物体に超音波を発射して、反射して戻ってくるまでの時間から距離を測定する。対象物の材質を選ばないので、バンパーなどに埋め込んで障害物とのすき間を検出するセンサーとして既に実用化済み。しかし、対象物の形状把握には不向きであることが短所となる。
2-3 判断:自動運転技術特化型AI(GPGSU)
各種センサーから集められた情報が自動運転特化型AI(特定の作業やタスクに限定して利用)機能を内蔵したGPGSU(コンピューターで画像や映像、3次元グラフィックス〈3DCG〉などの処理を担う特定用途の補助的なマイクロプロセッサの一種)に集約。「状況把握」と「行動計画立案」を行った後、統合ECUへ指令を出す。
2-4 操作(制御):統合指令ECU(Electronic Control Unit)
「ECU」とは、主に自動車に搭載される電子制御ユニットのことを指す。統合ECUは「判断」を行う自動運転特化型AIの指令を「走る・曲がる・止まる」に関わる各種ECU(センサーやステアリング、ブレーキ)に伝え自動運転車を操作(制御)する。
3章 自動運転レベルについて
自動運転レベルはSAE International(米国、Society of Automotive Engineers)が定義したものが使われ、「レベル1~5」までの5段階のレベルが設定されている。
現状の市販車レベルは各種ADAS(Advanced Driver-Assistance Systems、自動ブレーキ、車間自動制御、車線維持システム)機能が搭載されたレベル2相当の自動車が世界の主流となっている。
Tesla社(米国)のようにレベル5相当の自動運転機能搭載済みであることを公表するケースや、米国/中国の一部地域では既にレベル5相当の無人タクシー/無人配送車/無人作業車が公道上を走行しているのが現状である。
4章 主要4カ国の取り組みについて
【表1 主要4カ国(米国・中国・ドイツ・日本)取り組みについて】
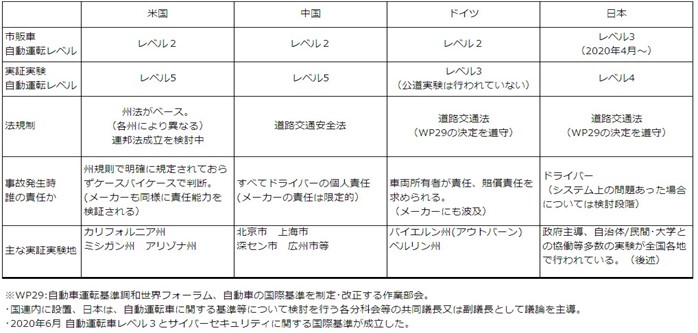
出典:各種報道資料などから筆者作成
① 主要4カ国の動向を見ると、市販車に関してはレベル2相当となっている
② 独自基準でレベル5(完全自動運転)の研究開発を進める米国/中国と、国連WP29の決定を遵守(じゅんしゅ)しようとするドイツ/日本の姿勢の違いが明らかで、更に事故発生時の責任所在について各国の足並みはそろっていない。
③ 日本では2020年4月道路交通法が改正され、レベル3相当の自動運転システムを使用する場合も道路交通法上は、「運転行為」に該当すると規定。レベル3相当の自動運転車が公道を走行できるとともに自動運転中事故が発生した場合はその責任はドライバーが負うことが明確になった。日本国内自動車メーカーはレベル3相当の市販車開発を進めるが実用化に至っていない。
5章 自動運転開発を進める注目企業9社から見えること
【表2 注目企業】
出典:各種報道資料などから筆者作成
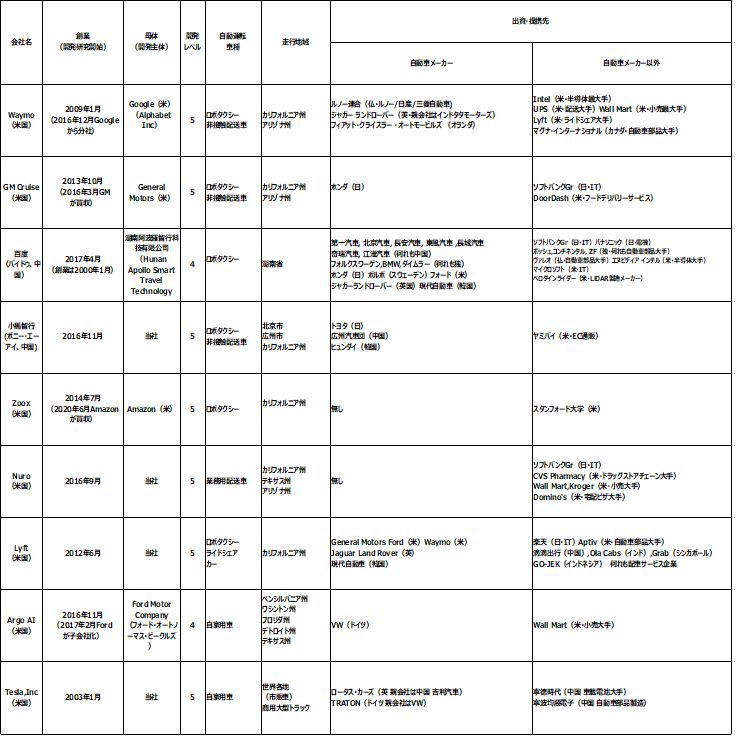
①開発主体が自動車メーカーとなっているのは「GM Cruise」「Argo AI」2社のみで、残り7社はいずれもIT企業、新興企業が開発主体となっている。IT・新興企業は自動車メーカーなどの出資提携を受け、自社の自動運転システムを自動車メーカーの車に搭載し自動運転開発を進めている。
②米国企業7社、中国企業は2社と社数だけでは米国企業が優位。しかし中国政府の手厚い支援の下、中国企業2社は急速に自動運転開発ピッチを上げている。特に百度(バイドゥ)は中国主要自動車メーカーの大半と提携し研究開発を進めている。
③Waymo(Google)の自動運転研究開始は2009年、他の8社も創業20年以内と自動運転車開発には業歴は不要。求められるのは優秀な技術者を集め、研究環境を整えることである。
④各社レベル4相当以上の自動運転車開発を行いつつ、他業態(EC通販、スーパーマーケット、飲食店、配車アプリ)と提携し、無人タクシー・無人非接触配送車の実用化を進めており、完全自動化が最も進んでいる。
6章 実証実験状況
6-1 海外での実証実験状況から見えること
【表3 海外(カリフォルニア/北京)実証実験実績】
![]()
単位:km
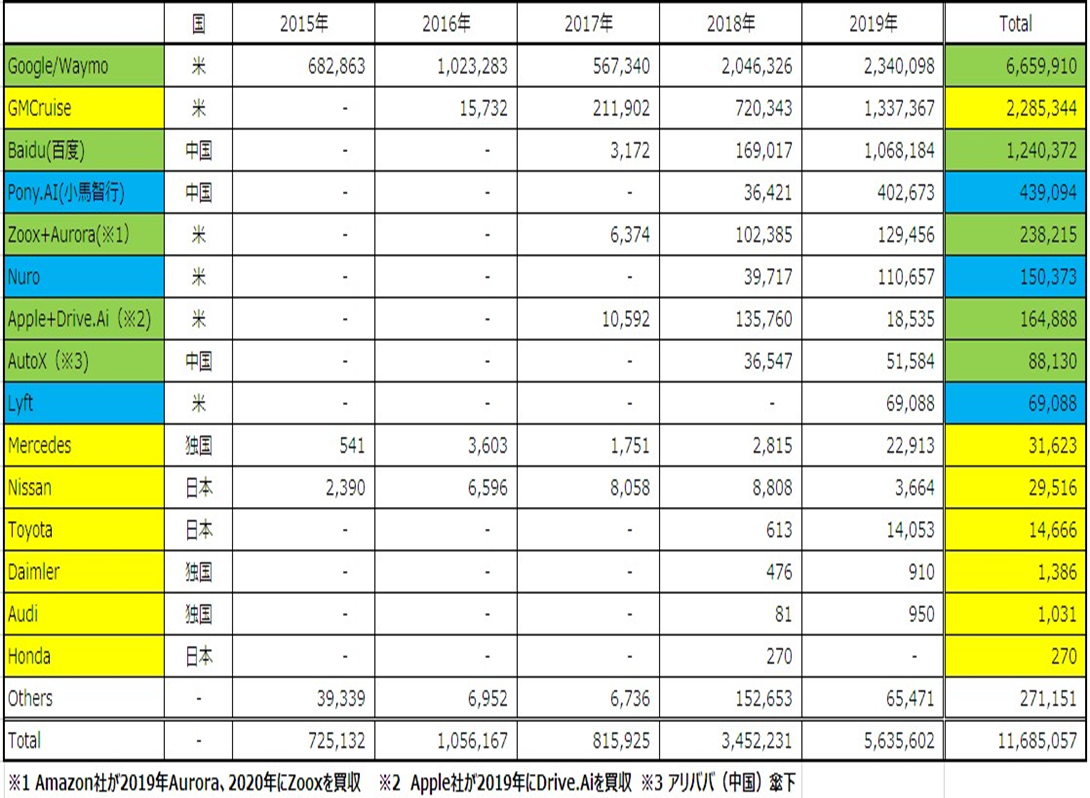
出典:California Department of Motor Vehicles、Beijing Innovation Center for Mobility Intelligence、各種報道資料などから筆者作成
カリフォルニア州では2014年から公道実証実験が可能となっており、世界の自動運転車開発の一大拠点となっていることに加え、北京市でも2017年から公道実証実験が開始されている。カリフォルニア州、北京市とも毎年の走行距離実績をメーカー毎に発表しており、両者の実績を合算したものが表3となる。実証実験実績から以下4点が見て取れる。
①Waymo(Google)社が約700万kmにも及ぶ圧倒的な走行実績を残しており。現在の自動運転車開発をリードしているが、北京市での公道実証実験が開始された2017年以降、中国勢(Baidu・Poni.AI・AutoX)が走行距離を伸ばし、Waymo(Google)を猛追している。
②「自動車メーカー」VS「IT・新興企業」の観点では「自動車メーカー合計 240万km」に対して「IT・新興企業合計 910万km」と「IT・新興企業」勢が圧倒的な走行距離を残している。
③「米国」VS「中国」の観点では「米国企業合計 950万km」に対して「中国企業合計180万km」と米国企業が現状圧倒している。一方、日本企業はわずか4万km超、ドイツ企業は3万km超と、公道実証実験に関しては米国勢・中国勢に大差をつけられている。
④ 5章で述べた注目企業9社のうち、「Argo AI」社はカリフォルニア・北京での公道実証実験実績はないがアメリカ他州での公道実証実験を実施。またTesla社は2019年、カリフォルニア走行実績がわずか12kmだが、市販車全ての車にオートパイロット機能や将来利用可能となる完全自動運転に対応したハードウェアを標準装備し、各車の運転データを本社に集約して自動運転機能を改善する手法で開発を進めている。④
6-2 日本での公道実証実験状況
国が主導する自動走行実証プロジェクトが15件行われているが、いずれも範囲、期間も限定されたものとなっている。各自治体での取り組みも行われており、国家戦略特別区に指定されている愛知県では2016年から公道実証実験を行っているが、走行距離合計は約4千km、外国での公道実証実験と比べて極めて少ない。
7章 自動運転車の問題点
【表4 自動運転車による主な事故】
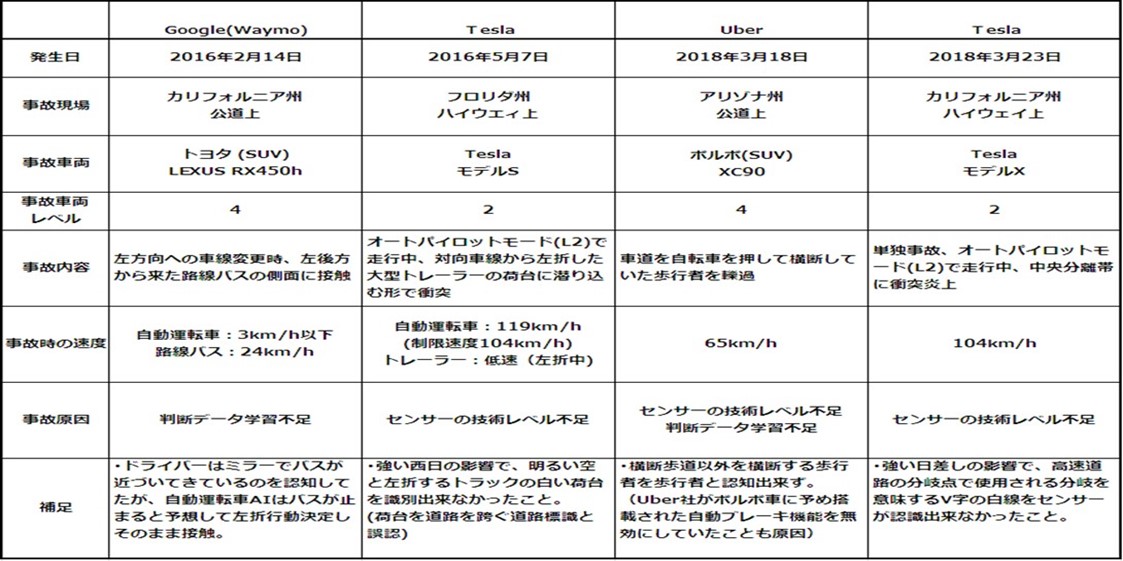
出典:各種報道資料などから筆者作成
7-1 各種センサーの限界
「日差しが強い」「豪雨」などの悪条件下でも各種センサーが正しく「認知」行動を行い、自動運転特化型AIが正しい判断(推測)を行うための正しい情報を提供することが必要であるが、各種センサーには性能限界が存在する。各種センサーの限界を超えた際に自動運転特化型AIは危機回避行動を取ることができず、誤った「判断・行動」を行い事故を起こすことをTesla社、Uber社の事故例は示している。(表4)
各種センサーの能力向上(限界点の引き上げ)が必要なことに加え、限界点を迎えても他のセンサー群の情報と地図情報を組み合わせ、機能限界にあるセンサーのリカバリーを安全に行う仕組み作りも求められる。
7-2推測判断に頼ること
Google社(Waymo)の事故では「バスが止まるであろう」と自動運転特化型AIが判断(推測)した後、左折行動を行った為接触事故が発生。(表4)
「ベイズ定理(正しく判断するための情報がほとんどない状態で適当に決めた確率に測定・観測を通じてより高い確率を計算)」を使って判断(推測)を行う自動運転特化型AIでは「計算上起こりえない状況」(頻繁ではないが、ゼロではない確率で発生する非常事態)へ対応できないことを示したものである。「計算上起こりえない状況」に対応するため(限界をなくすため)には、やはり実際の走行データ収集即ち実際の運転経験を積むしかない(※)。現在公道実証実験に加え無人タクシー・非接触配送車の実用化が進むのは特化型AIの判断(推測)のためのリアルデータ(異常事態も含め)を収集し、完全自動運転車のAIに生かすことが目的と考えることができる。
※自動運転特化型AIの開発者が一つ一つルール付けすること、シミュレーションデータによるルール付けを行うことも考えられるが、途方もない時間が必要となる。この点から見ると、Tesla社(米)の市販車データ収集による技術開発は合理性があるとも考えられる。
7-3 矛盾のある判断が出来ないこと
「自動運転車が制御不能になり、前方の横断歩道を渡る老人2人をひいて(老人2人死亡)停止するか、あるいは2人をよけて隣の車線前方にある停止車両(無人)に衝突して停止するか(自動運転車両内のドライバー1人死亡)」(いわゆるトロッコ問題)の選択を自動運転特化型AIが迫られるケースも想定される。
トロッコ問題に対しては、運転データを蓄積し推測判断を下すことしかできない自動運転特化型AIでは対応できない。必要となるのは、ルールベースのAI機能(理論に基づく手順に従うことで必ず正しい答えを導く、例えば「犠牲者を最小限にする行動を常に取る」とルール付け)が必要となる。ただし、「理論に基づく手順に従う」こととは、理論(ルール)を決める人間(開発者)の意図(理論)がそのまま自動運転特化型AIに反映されることになるため、十分納得性を持った理論(ルール)付けを行うことが必要となる。
7-4 セキュリティー問題
各種センサー、自動運転特化型AIへのサイバー攻撃により「認知・判断・操作」が悪意の第三者に支配され自動運転車による意図的な事故、さらには犯罪、テロが引き起こされる危険性を持つ。WP29(4章で説明)が、2020年6月「自動車向けサイバーセキュリティー対策を義務付ける指針」を採択済みであるが、具体的な法整備はこれからとなっている。現状では各開発メーカーのセキュリティー対策がまず求められるが、自動メーカー単独では開発が難しく、IT企業/新興企業主導での対策が取られていくと考えられる。
8章 まとめ
【自動運転とは】
自動運転とは人間行っていた運転行動を機械(自動運転特化型AI)に全て任せるもの、極論すれば自動運転車に命を預けるものと言える。レベル5相当の自動運転車では目的地を入力すればドライバー(人間)は自動車のことは気にせず移動時間を有効に使うことが可能になる、ドライバー(人間)の不注意による交通事故発生がなくなる、人手不足に悩む過疎地の移動手段が確保できるなど期待されることは非常に大きい。
【現在の問題点】
「認識」(認知)を担う各種センサーの性能、「判断」を行う自動運転特化型AIの判断能力のいずれにも限界があるため、レベル5相当の自動運転車には100%の安全性が保証できない。つまりドライバー(人間)の不注意による事故ではなくセンサー/自動運転特化型AIに起因する事故が発生する可能性が高いと言える。センサー/自動運転特化型AIに起因する事故発生をなくすためには、各種センサーの技術レベル向上はもちろんのこと、公道実証実験を繰り返し、ありとあらゆる運転経験を自動運転特化型AIに積ませるしか方法がない。カリフォルニア/北京ほか世界の各地で公道実証実験が行われ、無人タクシー/非接触配送車の実用化が進むのはまさに「経験」を積むために行われていると考えられる。
【開発状況】
自動運転車特化型AIが抱える問題解決のため、重要となる公道実証実験への取り組みと自動運転車開発をリードする主要9社の取り組みから見えることは以下の3点。
①「米国企業勢 vs 中国企業勢」の開発競争
「米国企業勢(公道実証実験実績950万km)」と「中国企業勢(わずか2年で180万kmの公道実証実験実績)」による開発競争がさらに加速すると同時に、自動運転車技術の進展スピードも加速すると考えられる。
②キープレーヤーはIT・新興企業
キープレーヤーは「圧倒的な実証実験実績データ」「意思決定・開発スピードが速い」「AI・セキュリティー技術にも精通」するIT・新興企業。既に非接触配送車、無人タクシーを実用化しており、今後も自動運転車開発をリードしていくと考えられる。
③ 自動車メーカーはレベル3・4相当の市販車開発を進める
安全基準に縛られる自動車メーカーはレベル3、4相当の市販車開発を進めつつ、IT・新興企業と協業し、レベル5相当の自動運転車の開発を進めていくと考えられる。
【日本に求められること】
日本自動車メーカーは公道実証実験実績の点で、世界に大きく後れを取っている。遅れを取り戻すためには①地域・期間を限定せず公道実証実験を可能とすること②国を挙げての開発支援体制拡充、WP29を通じての国際ルール作り主導③自動車メーカー、部品メーカー、ベンチャー企業の垣根を越えた開発体制構築――が求められる。







コメントを残す